سلام
لاتک برای قبل و بعد از محیطها استانداردی دارد که در درجهی اول توصیه میکنم آنها را جهت زیبایی هر چه بیشتر متن تغییر ندهید.
اینکه چرا ساختار \\[100pt] به شما در اینجا کمک نمیکند واضح است. بعد از این محیط لاتک با ایجاد فاصلهای استاندارد به پارگراف بعد میرود و به کار بردن این دستور در آنجا صحیح نیست و خطای
There's no line here to end. \end{figure}\\[100pt]
را به شما میدهد.
در صورت لزوم و در اینگونه موارد از دستور \vspace*{5pt} میتوانید بهره بگیرید که این دستور را نیز در اینگونه موارد توصیه نمیکنم.
بهتر است از دستورات بستهی etoolbox استفاده کنید و فقط برای یکبار در تمام سند فاصلهی قبل و بعد این محیطها را به صورت زیر و به دلخواه خود تنظیم کنید:
\BeforeBeginEnvironment{figure}{\vskip1cm}
\AfterEndEnvironment{figure}{\vskip1cm}
عکس شما نیز به درستی برش نخورده بود و کپشن در وسط آن به درستی تنظیم نمیشد که به صورت زیر آن را برش و با نام 233 در پوشهی مربوطه قرار دادهام:
در نهایت کدهای شما مطابق زیر شد:
\documentclass[12pt,a4paper]{report}
\usepackage{xcolor,colortbl}
\usepackage{graphicx}
\usepackage{fixltx2e}
\usepackage{amsmath,amssymb,mathtools}
\usepackage{MnSymbol}
\usepackage{hyperref}
\usepackage{caption}
\usepackage{subcaption}
\usepackage{float}
\usepackage{ulem}
\usepackage{multirow}
\usepackage{pgfplots}
\usepackage{etoolbox}
\usepackage[framed,numbered,autolinebreaks,useliterate]{mcode}
\usepackage{xepersian}
\DeclareGraphicsExtensions{.pdf,.png,.jpg}
\settextfont{XB Zar}
\setdigitfont{XB Zar}
\definecolor{a}{RGB}{84,109,204}
\defpersianfont\myfont{IranNastaliq}
\newcommand{\myhyperref}[2]{\hyperref[#1]{#2\ref*{#1}}}
\hyphenation{MATLAB}
\linespread{1.5}
\lstdefinestyle{MADAD}{%
captiondirection=RTL,language=Matlab
}
\def\lstlistingname{برنامه}
\BeforeBeginEnvironment{figure}{\vskip1cm}
\AfterEndEnvironment{figure}{\vskip1cm}
\begin{document}
\subsubsection{قسمت تناسبی \hspace{10mm}Term Proportional}
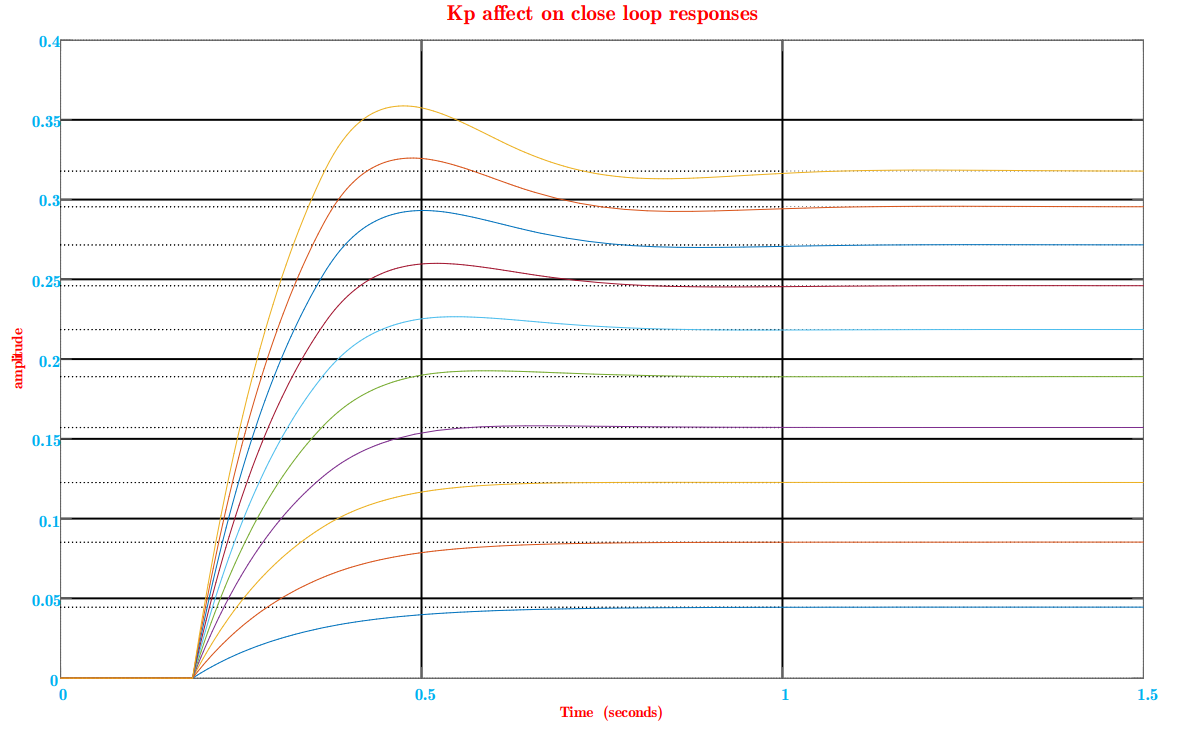
قسمت P خروجي سيستم را به صورت نسبتي از خطاي سيستم تنظيم مي كند.يعني در واقع جهت اصلاح خطا آن را با نسبتي خاص در ورودي و در جهت اصلاح آن اعمال مي كند.انتخاب P هاي بزرگ سبب پاسخ سريع و بزرگ به سيستم مي گردد.كه در اكثر موارد منجر به ناپايداري سيستم مي شود.انتخاب P ها كوچك زمان رسيدن به نقطه ي مطلوب را افزايش مي دهد.\\
پاسخ يك كنترل كننده ي P تنها به ورودي پله (يك خطاي ناگهاني) بستگی دارد.شيب صعود و بزرگي فراجهش به بزرگي P بستگي دارد.\\
در اینجا با استفاده از میتوان پاسخ پله از حلقه بسته سیستم برای چندین مقدار ضریب kp را مشاهده کرد :
\setcounter{footnote}{0}
\begin{figure}[H]
\centering
\includegraphics[width =14cm]{233}
\caption{نمودار اثر ضریب Kp بر پاسخ سیستم حلقه بسته}
\label{pic.10}
\end{figure}
بخش انتگرال گيرسيستم حاصل جمع تعدادي از خطاهاي گذشته ي سيستم است.در واقع از زماني كه سيستم شروع به داشتن خطا مي كند.خطاهاي سيستم در اين بخش جمع مي شود و وقتي سيستم به موقعيت مطلوب رسيد دوباره اين بخش صفر مي گردد.\\[20pt]
غالبا استفاده از I تنها منجر به پاسخ هاي بسيار كند و گهگاه نوساني مي گردد.به همين خاطر معمولا بخش P را بابخش I ترکيب كرده و كنترل كننده PI را بوجود مي آورند.\\[20pt]
\end{document}
خروجی شما با نسخهی اولیه از تکلایو 2018 مطابق زیر است:
![enter image description here][2]
موفق باشید.

